Surrey, United Kingdom – 19 June, 2019 – Oilfield Technology publishes two-part article about the technical advances of Entro's AutoWalk and AutoLift oil rig mobility systems. The full text of the article can be read below or at The Next Step - part one and The Next Step - part two
Walking systems have come a long way since Oscar Martinson invented the first walking mechanism for a walking dragline in 1913. The first walking systems were mechanically driven directly off of the output shaft of the engine and steered by rotating the entire walking mechanism around the base of the dragline on a massive slewing ring. Modern walking systems typically use hydraulics to lift and move extremely heavy loads and, as a result, they can be one of the lightest and most cost-effective moving systems on a dollars-per-pound basis. All around the world, land-based drilling rigs use walking systems for moving drilling substructures and equipment on drilling sites and, in some cases, between drilling sites.
Modern walking systems use various mechanisms to allow moving loads in any direction, spinning about a point, and steering. So-called ‘plank walkers’ from the early days of rig walking systems could not move in all directions. In the early days, there was either a walker that could move in any direction on the outside of a structure, or a walker with limited steering inside a structure.

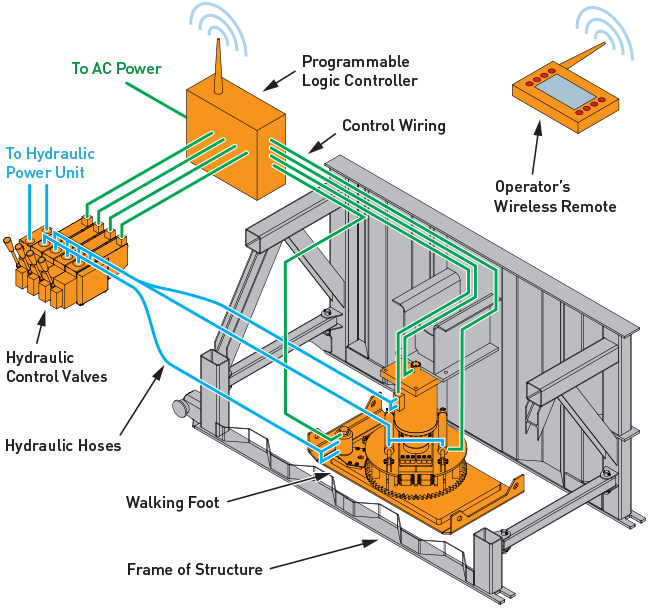
The Entro Kingpin Walking System is designed to overcome the limitations of earlier walkers by enabling a large foot to fit in a small space and move in any direction at any time. A roller traverses over the top of a steel ‘foot’ in a guide track. The guide track is connected to the foot by a center pivot pin, which allows the roller to traverse in any direction over the foot without rotating the foot itself. A mechanical linkage between the foot and the rig structure prevents the foot from rotating, which means that the foot can be long (to reduce ground bearing), but still allows walking in any direction while longer than the space between the main beams of a drilling substructure frame.
The world is becoming increasingly automated, and walking systems are no exception. Drilling companies are always looking for ways to improve safety, to reduce rig-up and rig-downtime, and to extend the capabilities of their drilling rigs. New walking system technologies can help.
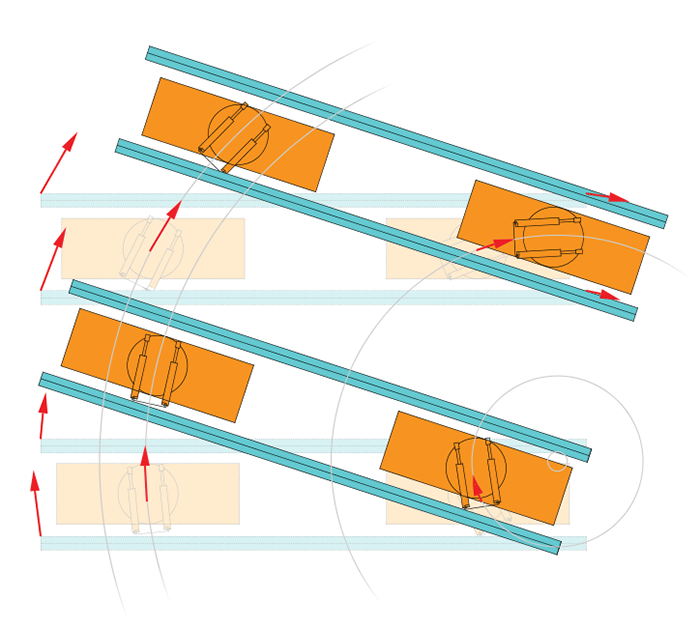
The walking cycleIn almost all walking systems, the walking cycle consists of four phases. In phase 1 (the lifting phase), the rig is lifted off of the rig mat onto rollers or skids. In phase 2 (the travelling phase), the rig is rolled or skidded over the walking feet. In phase 3 (the lowering phase), the rig is lowered back onto the rig mat and the feet are usually lifted off of the rig mat. In phase 4 (the resetting phase), the foot is pushed ahead of the rig.
Without automation, workers act as spotters to coordinate with the operator on every phase of the cycle:
In an automated system, every phase can be faster and safer. Since the rig is automatically lifted to the correct height, spotters do not get too focused on the feet and can watch out for unexpected snags during traveling. Automation allows the walking cycle to go from phase to phase instantly, instead of requiring the operator to wait for confirmation from each spotter that all the feet are ready to go. Lifting and lowering are consistent, meaning that no time is lost lifting a foot or the rig too high off the mats. With Entro Industries’ AutoWalk system, the operator can interrupt the cycle at any time to adjust the cycle and get back to walking without reprogramming the system.
Automatic walking systems often use position and load sensors in the lift jacks to control the lifting process.
In a walking system without automated lift control, lifting a load requires expert coordination and planning. Because the operator cannot see the whole rig at once, spotters should watch each walking foot to make sure the feet are correctly positioned. To start a lift, each foot should be lowered onto the ground until the foot starts to bear significant load. The spotters must watch the foot and ensure that rig mats are firmly planted on the ground, that the walking feet are bearing on the rig mats, and that all backlash is taken out of any pin joints.
Typically, pressure compensated hydraulic control valves can match lifting speeds between each jack; however, this cannot account for differences in soil conditions, differences in rig matting, or simple mistakes like a jack not extending because a hydraulic quick-disconnect was not properly connected. As such, the spotters must pay careful attention to the entire lifting process to ensure correct preload, speed, and height, which can keep their attention directed towards operating the machine and away from keeping people safe.
With an automatic system, the spotters are better able to focus on keeping personnel in the area away from the rig. Typically, only one spotter and one operator are required to coordinate a safe rig move. The spotter stands on the opposite side of the rig to the operator and keeps personnel clear. Position and load sensors in the jacks can automate the preloading process. Some systems simply extend the jacks a fixed amount, or extend the jacks until a certain load is reached, to ensure proper preload. Entro Industries’ AutoLift system uses a machine-learning algorithm to monitor changes in load with respect to jack extension to determine when a jack is loaded. This system automatically compensates for changes in weight distribution on the rig and changes in soil compressibility, ensuring the rig is always lifted level.
Automatic lifting ensures that the rig is lifted to the same height on every walking step. This prevents overlifting (which can cause damage to the rig by lifting it unevenly), and underlifting (which can create a hazard if a high rig mat is snagged by the rig).
One of the basic requirements of any walking system is the ability to steer. After all, if steering is not needed, why not just use a skid system? Most walking systems use a mechanical system to change direction, either by rotating the entire walking foot, or, with the Kingpin Walking System, simply by turning the roller track on top of the foot.
Without automation, changing the steering direction of a walking system generally requires technicians to make manual adjustments to each walking machine. On well-designed systems, steering angles are typically marked on each walking foot mechanism, so doing a ‘crab’ move at 45° means adjusting each walking foot to steer along the 45° mark. Some systems also allow spinning the rig about well centre by coordinating the steering angles of the feet, usually by rotating each foot to a special ‘spin’ mark. To steer like a truck (with the front walking feet going diagonally and the back feet going straight), personnel need to coordinate and remember each angle to steer each foot.
Changing the steering direction of a foot is usually done by hand using a lever mechanism. Even if a power steering system is used, if it is not automated the operator still has to steer ‘to the number’.
With an automated system, steering can be as simple as pushing a button. With Entro Industries’ AutoSteer system, the operator can select any point on the ground to spin about, or set the vehicle steering angles to perform ‘simple’ (like a car) or ‘complimentary’ (like a firetruck) steering. The computer calculates the correct angle for each foot and makes the steering adjustments automatically. This can save a significant amount of time, since the operator does not have to go from foot to foot making adjustments, or second-guess themselves about whether negative 6° is the same as positive 354°.
Automatic steering keeps operators away from machinery and out of harm’s way, since steering adjustments can be made by remote control. Automatic lifting keeps the rig from being lifted unevenly, causing damage. The wireless remote with integrated machine display reduces the amount of information spotters must pass to the operator, allowing spotters to do their job more effectively.
SpeedSince the automatic walking system can react almost instantly, no time is lost going from lifting to travelling, or from lowering to resetting. Automatic steering turns a 15 minute job (with a trained crew) into a 15 second job.
The speed benefits of automation can have a compounding effect. Since automation makes using the walking system easier, crews now have another tool in the toolbox to solve problems they might have otherwise waited for a crane for, like pinning large modules together. Sometimes the most cost-effective way to move a rig to a new drill site is to simply walk it, even if it takes a few days. Moving from pad to pad along service roads is much quicker and easier with automation, since there is no downtime in the walking cycle or for steering adjustments, and those time savings add up during a long move.
CapabilityEntro Industries’ AutoSteer system is designed to allow a rig to spin about any point on the ground, which can be a huge help for slant-hole rigs that have to adjust the azimuth of the rig at each well. Spinning about a point can also be useful when trying to pin align pins; an operator can set the centre point in between the pins and make minor tweaks easily. A wireless control with on-board load sensing makes getting rig weights almost instantaneous.
Even with all the automation, Entro Industries still builds walking systems as manual machines first, with automatic features as an add-on. This means the automation simply adds new features without compromising the reliability of a proven design. The aim was to make sure that the new technology would not create more headaches for the customer if a cable was damaged or there was a loss of power, for example. Even if the entire PLC is lost, it can still be walked like a manual system.
Written by Nathan Klammer and Jason Ross, Entro Industries.
About Entro Industries
Entro Industries has over 55 years of design and manufacturing experience in the oil industry, providing simple solutions to complex engineering and manufacturing problems. Entro’s expertise is in the areas of conceptual design and feasibility studies, mechanical and structural design, engineering and drafting support, third party engineering review and risk assessment.